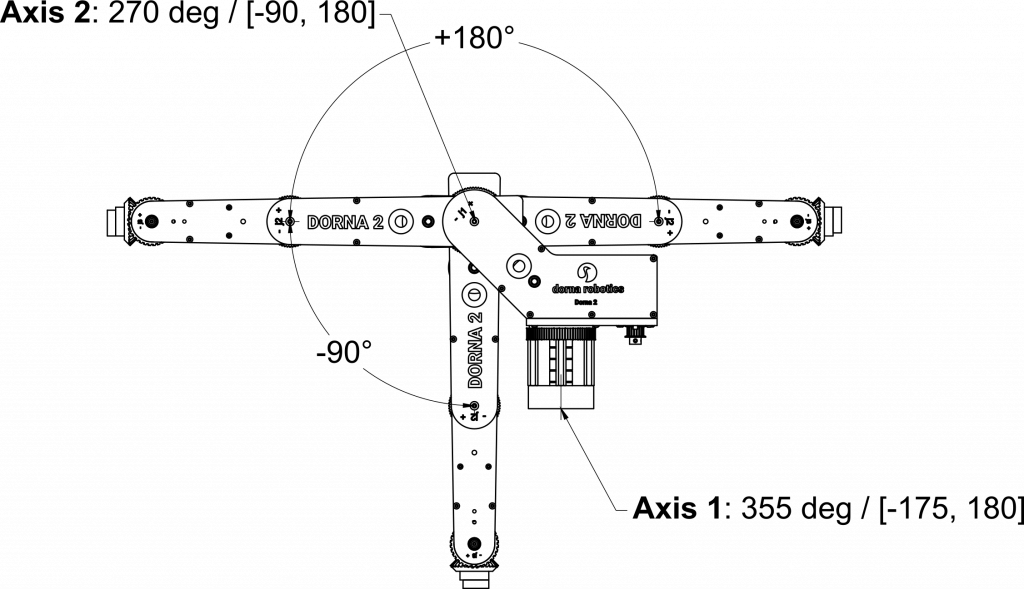
Joint limit
Each joint in the robot has a limited range of rotary motion, known as joint limit (upper and lower limits). We use some of these hard limits for homing the robot as well. So, make sure that the robot is not hitting these hard limits, and only touches them when necessary. Hitting these limits with force, can cause physical damage to the robot and harm the homing process.
Notice that, depending on the robot orientation, some additional limits may apply to each joint.
| Joint | Range of motion | Lower limit | Upper limit |
|---|---|---|---|
| j0 | 355 | -175 | 180 |
| j1 | 270 | -90 | 180 |
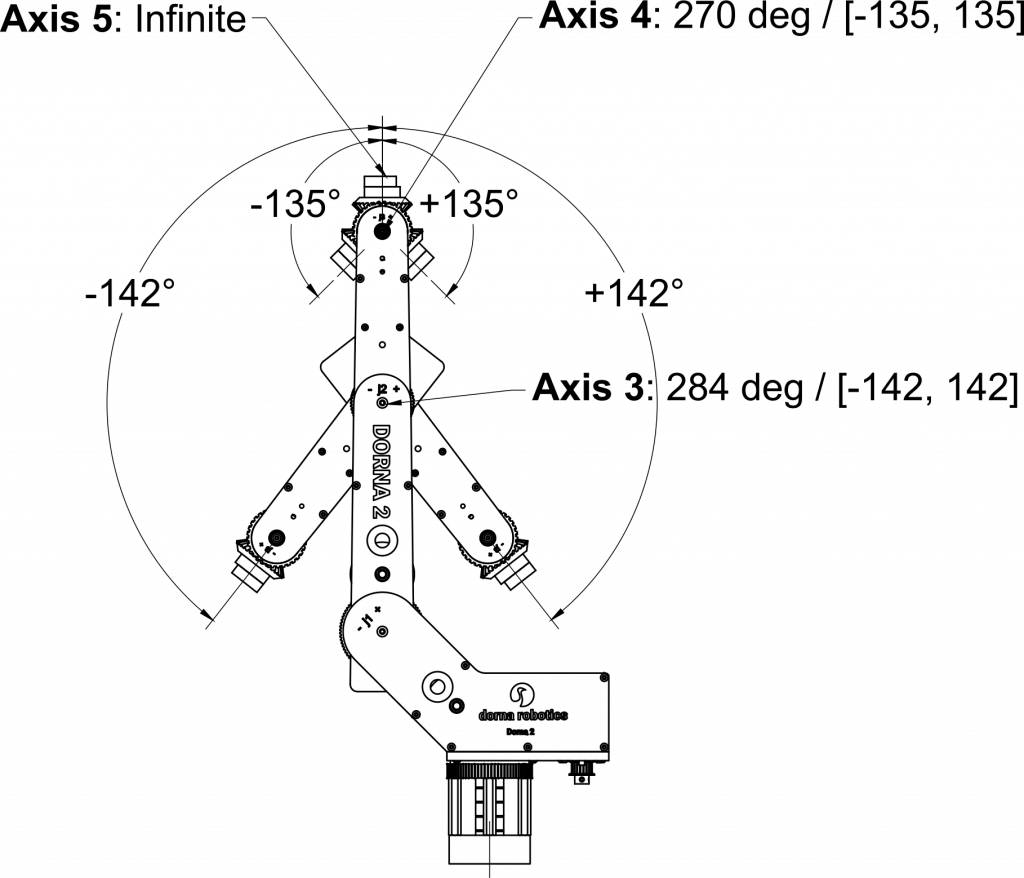
| j2 | 284 | -142 | 142 |
| j3 | 270 | -135 | 135 |
| j4 | Infinite | N/A | N/A |