Set tool length
When using the robot it is important to define the tool length exactly in the way you are using it in your application.
The tool length is calculated in mm, and is defined by the exact distance between the robot flange frame and the tip of the end effector (along the Z direction).
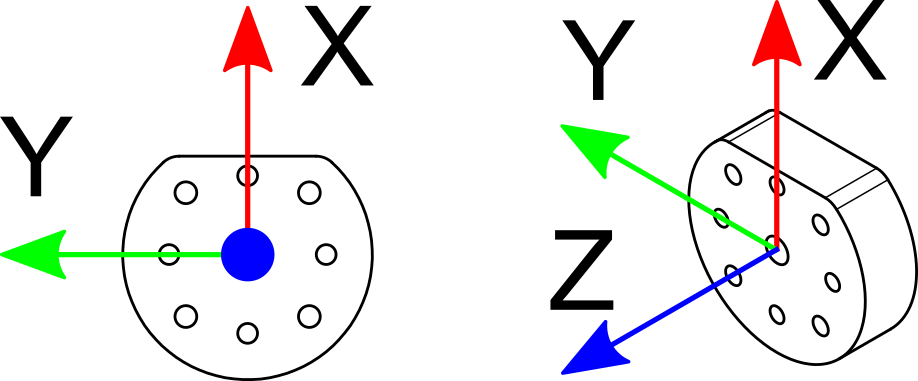
You can update the tool length based on the toolhead that you are using. The correct tool length value is specially important if you work in the Cartesian coordinate system, and you are interested in (x, y, z, a, b) values of the TCP. If you prefer to work in joint’s coordinates, or you are interested in X, Y, Z values of the robot flange you might want to leave the TCP at its default value (default value is 0).
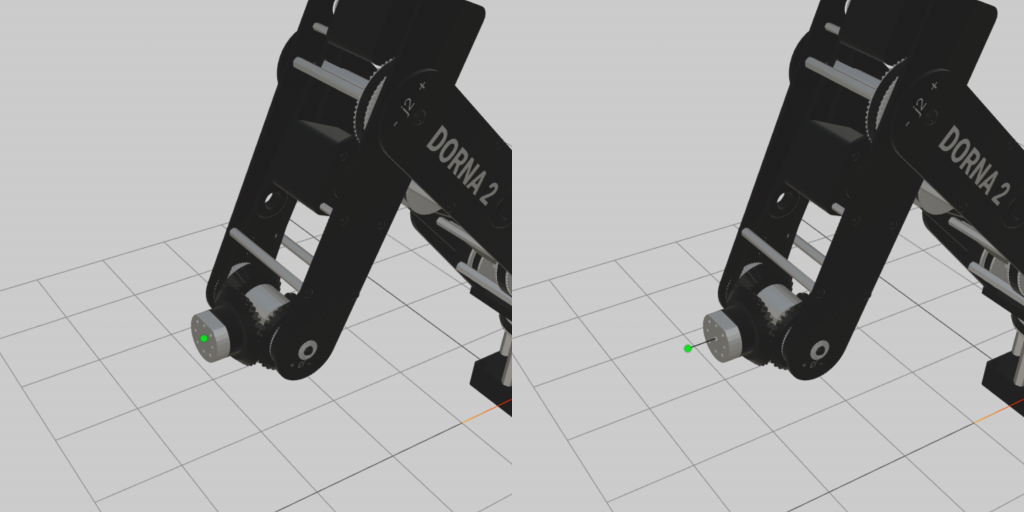
In the left image the tool length is set to 0 mm (default value), and in the right image the tool length is set to 20 mm.